Les robots dépendent de moteurs miniatures pour leurs mouvements.
L'évolution de la robotique repose donc sur les avancées technologiques dans la conception des moteurs. Dave Beckstoffer, de Portescap, met en lumière les principales tendances en matière de développement de moteurs miniatures pour les robots.
L'utilisation de robots prolifère dans les applications, des salles d'opération aux opérations sur terrain. Alors que les robots se spécialisent, un point commun est le développement correspondant de moteurs miniatures dont ces robots dépendent pour leurs mouvements. Les progrès réalisés dans le développement des robots doivent donc être accompagnés d’évolutions dans les moteurs qui les font se mouvoir.
Mobilité et compacité
La conception des robots, en particulier pour les cobots, doit permettre la mobilité et la compacité. Pour correspondre efficacement à la capacité d'une main humaine, les moteurs qui l’actionnent nécessitent une forte densité de puissance dans un boîtier petit et léger. Une densité de puissance plus élevée dans un moteur plus petit et plus léger détaille l'avantage des moteurs à courant continu sans balais (BLDC) par rapport aux conceptions conventionnelles. Les moteurs BLDC sans encoches, associés à des réducteurs planétaires efficaces, permettent d'obtenir cette combinaison et peuvent être intégrés dans des formats de robot typiques pour s'adapter à la contrainte d’espace.
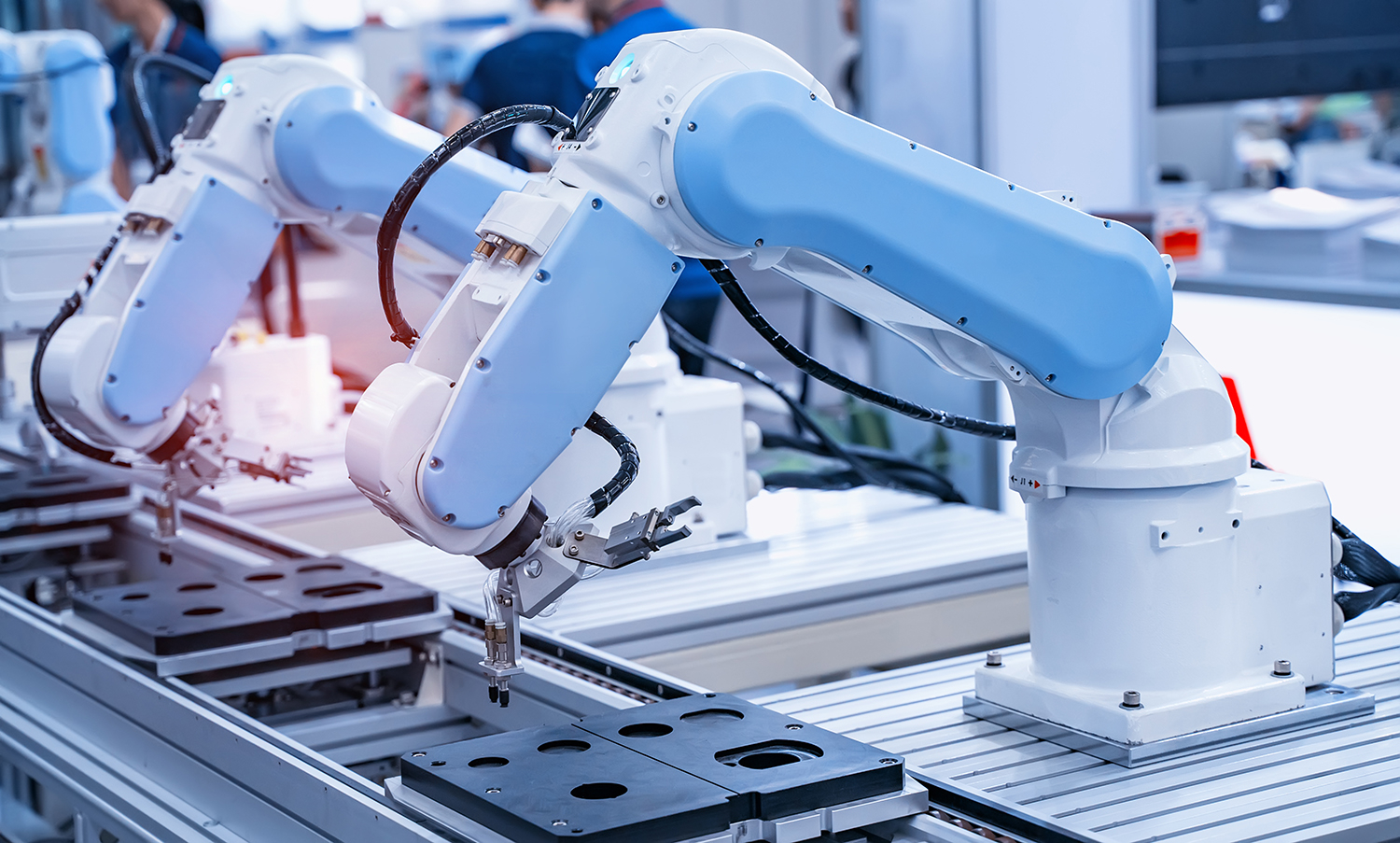
Les principales capacités des robots impliqués dans des tâches telles que l'automatisation de la fabrication, sont la vitesse et la précision. Dans une application robotique de type « pick and place », les moteurs à courant continu sans fer et les moteurs pas-à-pas à aimant disque sont bien adaptés. Ceci principalement en raison de leur inertie extrêmement faible, permettant des changements répétés et rapides d'accélération et de décélération. De même, les applications nécessitant un contrôle dynamique mais souple, telles que les systèmes de caméra, bénéficient de l'élimination du couple d'engrenage ou de détente, ce qui fait du moteur BLDC sans encoches un excellent choix.
La mobilité de nombreuses applications robotiques dépend de la puissance des batteries, ce qui fait de l'efficacité énergétique un facteur critique. Les moteurs à courant continu à balais sans fer peuvent atteindre un rendement de 90 % et sont choisis lorsque de longues durées de fonctionnement du robot sont nécessaires. Pour les applications à couple élevé et à faible vitesse, il est également essentiel de s'assurer que le réducteur est efficace et adapté au moteur.
Robustesse et durée de vie prolongée
Un avantage important des robots est qu'ils peuvent être utilisés dans des environnements et des conditions que les humains ne peuvent pas, ou idéalement ne devraient pas, supporter. La surveillance et la patrouille de pipelines industriels, de réseaux électriques à haute tension ou même sur des zones de conflits signifient que les robots sont mis en mouvement par des moteurs miniatures protégés contre les conditions les plus difficiles pour assurer un fonctionnement continu.
Une protection contre les températures et les pressions extrêmes est nécessaire pour les applications robotiques telles que les robots chirurgicaux soumis à la stérilisation en autoclave. Le moteur du robot dépend d'un haut degré de résilience ; le fait de placer les composants dans une époxy thermodurcie maximise la robustesse et prolonge son cycle de vie.
Sécurité et productivité
Lorsqu'il s'agit de robots, la sécurité et la productivité sont inextricablement liées. Un contrôle imprécis peut causer des dommages physiques, que ce soit dans un cadre chirurgical ou sur le lieu de travail, tandis que l'arrêt d'une machine à la suite d'une violation de la sécurité peut entraîner des dommages au produit et des temps d'arrêt. Les robots continueront donc à s'appuyer sur des dispositifs de retour d'information de haute précision pour assurer leur protection et celle de leur environnement.
Les codeurs haute résolution permettent une commande précise et rapide des moteurs dans les applications qui exigent une combinaison de contrôle et de vitesse élevée. Sur un système de soudage robotisé, le retour d'information haute résolution obtenu dans un boîtier robuste est crucial pour assurer la précision des mouvements du robot.
Autonomie et contrôle multiaxes
Un aspect clé du développement de la robotique est l'autonomie et l'apprentissage des machines. On en trouve un exemple dans les véhicules autonomes et la robotique de surveillance. La technologie LiDAR (imagerie, détection et télémétrie par la lumière) capture des images 3D de l'environnement pour une navigation autoguidée, un balayage à des fréquences de rafraîchissement très élevées et un retour d'information à haute résolution pour la vitesse et la précision du contrôle. Les systèmes de miroirs basés sur la technologie LiDAR sont de plus en plus souvent actionnés par des minimoteurs sans balais qui combinent une faible dissipation de chaleur avec un rendement élevé.
Les applications robotiques complexes peuvent nécessiter le contrôle de plusieurs axes, comme les robots chirurgicaux, qui exigent une coordination étroite. Pour y parvenir, des capteurs équipés d'une interface de communication série peuvent fournir des informations de position absolue avec une résolution typique de 14 bits et une précision de l'ordre d'un degré mécanique. Une considération importante des applications multiaxes est de minimiser l'encombrement. La compacité inhérente aux moteurs miniatures peut être combinée à des protocoles de communication par interface en série qui permettent de réduire le câblage grâce à des connexions « en guirlande » des codeurs.
Image : Les moteurs à courant continu sans fer et les moteurs pas-à-pas à aimant disque sont bien adaptés aux robots qui effectuent des tâches de prélèvement et de placement dans l'automatisation de la fabrication en raison de leur inertie extrêmement faible.