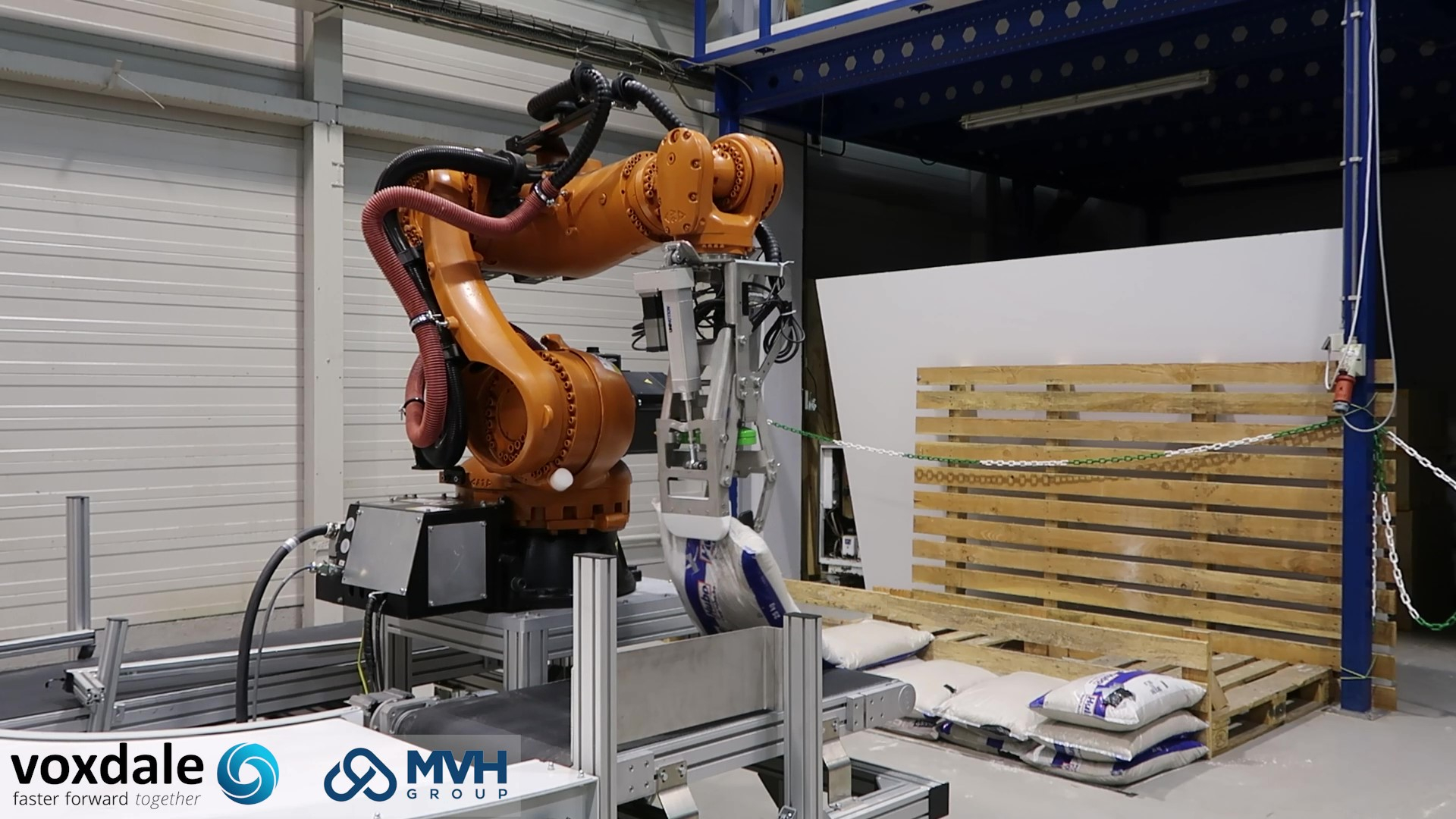
Actionneur Linéaire d’Act In Time sur un bras robotique de Voxdale et MVH-group.
Un robot serait-il un jour capable de décharger de manière autonome une cargaison de marchandises ensachée, d’un navire ?
Telle était le problème posé par Voxdale et MVH Group, problème auquel Act In Time et ses partenaires ont apporté une solution.
La présentation ci-dessous montre comment un bras robotique décharge des sacs de ciment d'une palette. La difficulté ici est que ces sacs n'ont pas toujours la même épaisseur ou la même résistance. Nous avons étudié et travaillé ce problème et avec notre partenaire Voxdale, avons trouvé la bonne solution pour le mouvement de la pince. Le PNCE actionneur linéaire avec vis à billes d'Unimotion est combiné avec le moteur pas à pas AZ en boucle fermée d'Oriental Motor qui lui est contrôlé par bus EtherCAT du contrôleur robot. Cela s'est avéré être une excellente combinaison pour répondre à toutes les exigences :
En première phase, un mouvement rapide est nécessaire pour ouvrir ou fermer la pince, ce qui est déterminé par les différentes positions. Le codeur de position absolu intégré d'Oriental Motor, fonctionnant sans batterie, garantit un suivi de position exacte à tout moment.
Dès que la pince est plus proche de la charge, le réglage se fait à la force de poussée. Il s'agit d'une autre caractéristique unique de la technologie en boucle fermée permettant d'utiliser le moteur pas à pas pour des applications où le contrôle du couple/force est nécessaire. Grâce à une construction mécanique intelligente, la pince se centre parfaitement autour de l’objet, garantissant ainsi une bonne répartition des forces de préhension ceci indépendamment de l'épaisseur du sac ou de la charge.
Le bras robotique "T-Rex" peut ainsi saisir le sac de ciment en toute sécurité et le déplacer vers un convoyeur de décharge, comme on le ferait manuellement. Il n'y a aucun risque d'endommager le sac, car la force peut-être précisément ajustée et reste toujours la même.
Les différentes parties du robot ont été fournies par les partenaires :
- Le bras du robot est de fabrication KUKA.
- Les capteurs utilisés pour scanner l'environnement autour du robot permettant de se déplacer en toute sécurité dans son environnement, ont été fournis par Pickit 3D.
- Le préhenseur est composé par Act In Time à partir de l'actionneur PNCE d'Unimotion et combiné avec le moteur pas à pas AZ en boucle fermée d'Oriental Motor.
Voici la présentation :