Yamaha Motor lance une nouvelle option RCX3-SMU pour le contrôleur de robot.
Ses fonctions de sécurité, notamment pour le contrôle de la vitesse et de l’espace de travail, sont certifiées par un organisme extérieur.
Yamaha Robotics a annoncé le lancement, en juin prochain, de l’option fonctionnelle de sécurité RCX3-SMU pour les robots SCARA et cartésiens dotés de trois axes ou plus commandés par le contrôleur de robot RCX340.
Exigences de sécurité
Parallèlement à la demande croissante de robots industriels face à la pénurie et au coût grandissant de la main-d’œuvre et au besoin d’automatisation avancée dans de nouveaux domaines comme l’IoT/CASE, les exigences de sécurité sont de plus en plus strictes pour les robots industriels.
La sécurité fonctionnelle du RCX3-SMU a été reconnue par l’organisme de certification TÜV SÜD, et ses fonctions de sécurité respectent la norme ISO 10218-1 pour les robots industriels. Les fonctions STO, SS1, de contrôle de vitesse… contribuent à la sécurité de cet équipement.
Yamaha Robotics propose une large gamme de petits robots utilisés sur les lignes de production automatisées : convoyeurs linéaires, robots à axe unique, robots SCARA, systèmes de vision, contrôleurs… L’entreprise vise à fournir les meilleures solutions en fonction des besoins de chaque client.
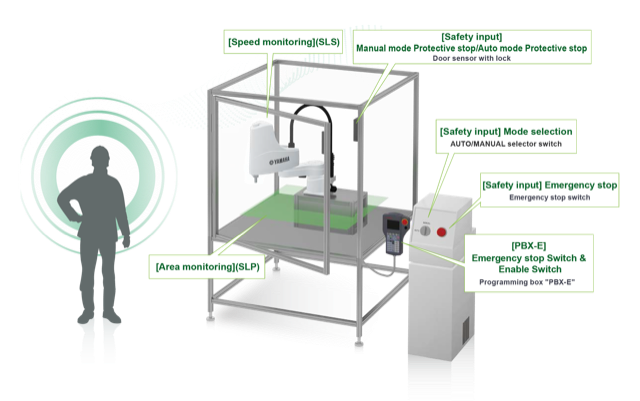
Principales fonctions de sécurité du RCX3-SMU
1) Fonction STO (Safe Torque Off)
Le commutateur de la source d’alimentation principale (celle qui entraîne le moteur) coupe l’alimentation en énergie du contrôleur. (= état sécuritaire)
2) Fonction SS1 (Safe Stop 1)
Surveille le statut de décélération et d’arrêt du robot. Si le robot s’arrête, ou ne décélère pas suffisamment ou au bon moment, la fonction STO s’exécute pour que le processus revienne à l’état sécuritaire.
3) Fonction de contrôle de la vitesse (SLS)
Surveille la vitesse du robot. Si la vitesse définie est dépassée, la fonction SS1 s’exécute.
4) Fonction de contrôle de l’espace de travail (SLP)
Les positions en coordonnées cartésiennes et en largeur d’impulsion du robot sont surveillées. Si la plage définie est dépassée, la fonction SS1 s’exécutera.
5) Fonction d’entrée de sécurité
Surveille le statut du port d’entrée de sécurité. La fonction SS1 s’exécute selon le statut du port d’entrée de sécurité, et de la fonction d’entrée de sécurité (arrêt d’urgence, sélection du mode, arrêt de protection mode manuel, etc.) définie pour chaque port.
6) Fonction de sortie de sécurité
Chaque port de sortie de sécurité envoie l’état interne défini (état d’arrêt d’urgence, état sécuritaire, etc.).
Pour plus d’informations : https://global.yamaha-motor.com/business/robot/lineup/controller/rcx3-smu/